Autonomous Driving Testbed
 DeepNNCar Testbed
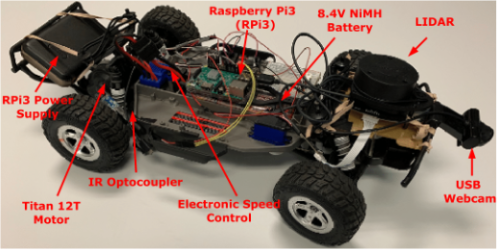
DeepNNCar TestbedTo implement, validate, and test our research products, we have mainly used the CARLA simulator and the DeepNNCar. While CARLA is a well-known open-source urban driving simulator, DeepNNCar is a low-cost research testbed that was designed in the Smart and Resilient Computing for Physical Environments Lab (SCOPE). DeepNNCar is built upon the chassis of Traxxas Slash 2WD 1/10 Scale RC car and is mounted with a USB forward-looking camera, IR- optocoupler, and a 2D LIDAR. The speed and steer for the robot are controlled using pulse-width modulation (PWM), by varying the duty cycle. [Recommended Reading] [Web Content]
Demonstration
A demonstration of the DeepNNCar operating on an indoor track. The car performs end-to-end driving using a modified NVIDIA DAVE-II convolutional neural network. The network is trained to drive within the tracks while achieving high speeds. You can learn more about the platform from our GitHub